CADRE: Enjambres Robóticos y Cerebros Digitales para la Conquista de la Luna.
La exploración de nuestro sistema solar se ha enfrentado históricamente a un cuello de botella operativo: los retrasos de comunicación y la dependencia de un mando centralizado. Durante décadas, utilizar un vehículo explorador a Marte, o a entornos lunares complejos, ha implicado un proceso lento. Un rover captaba una imagen, la transmitía a la Tierra y debía esperar a que los ingenieros analicen los datos para enviarle la siguiente instrucción. Este frecuente «llamar a casa» consume un tiempo precioso y limita nuestra capacidad para explorar zonas complejas.
Para superar esta barrera, la exploración espacial busca aumentar la autonomía de las misiones. Aquí es donde entra en juego el proyecto CADRE (Cooperative Autonomous Distributed Robotic Exploration) de la NASA, diseñado para demostrar que múltiples robots pueden cooperar y explorar juntos de forma autónoma.

Estos son los rovers de demostración tecnológica CADRE (Exploración Robótica Distribuida Cooperativa Autónoma) de la NASA, probados en un entorno de sala blanca. imágenes de NASA, del Jet Propulsion Laboratory, California Institute of Technology.
Por un lado, encontramos la robótica móvil miniaturizada: en lugar de un solo vehículo pesado, se despliegan pequeños rovers del tamaño de una maleta de mano. Por otro lado, el elemento que verdaderamente potencia este hardware es el software de autonomía multiagente. Al dotar a estos robots de esa autonomía, pueden comunicarse entre sí mediante una red de malla y tomar decisiones operativas de forma cooperativa sin la intervención constante de controladores humanos en la Tierra.
La era de la robótica móvil.
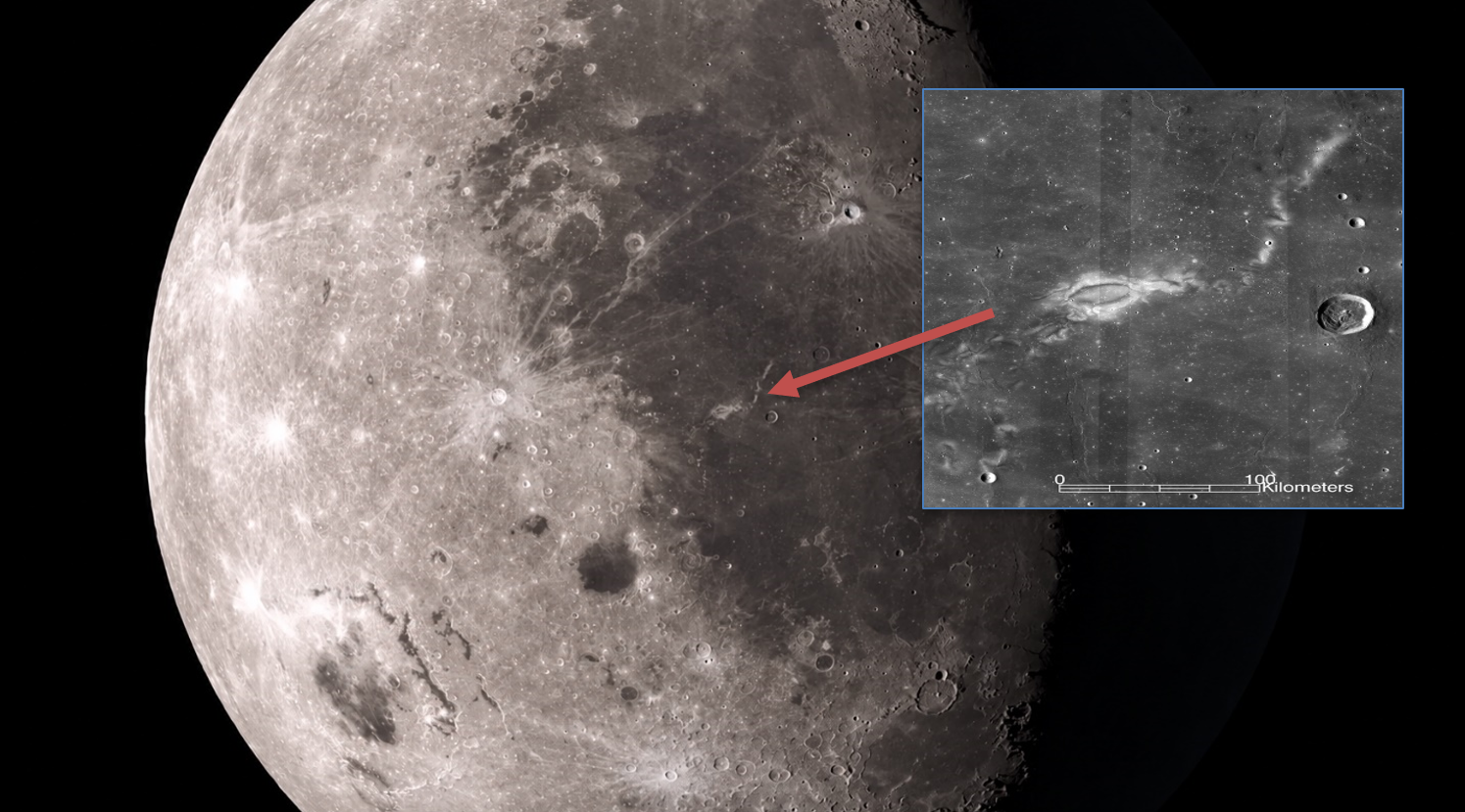
Para ilustrar el verdadero potencial de descentralizar la exploración, nos situaremos virtualmente en la región lunar de Reiner Gamma, donde está previsto que CADRE ponga a prueba a su equipo robótico. Pero antes, es fundamental entender la primera pieza de este rompecabezas: la robótica móvil miniaturizada espacial.
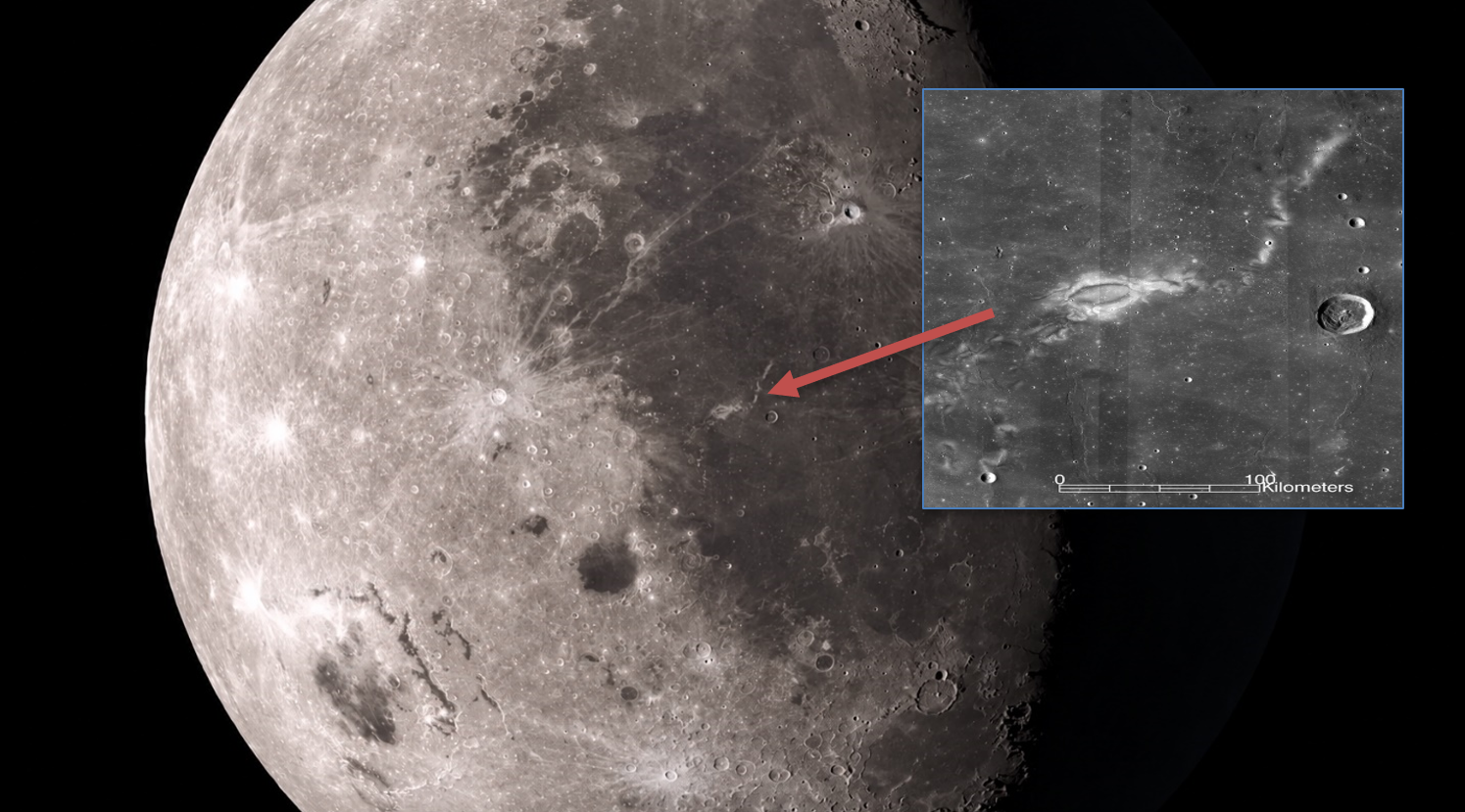 Localización de la región lunar de Reiner Gamma. Composición imágenes de NASA/Goddard Space Flight Center/Arizona State University.
Localización de la región lunar de Reiner Gamma. Composición imágenes de NASA/Goddard Space Flight Center/Arizona State University.
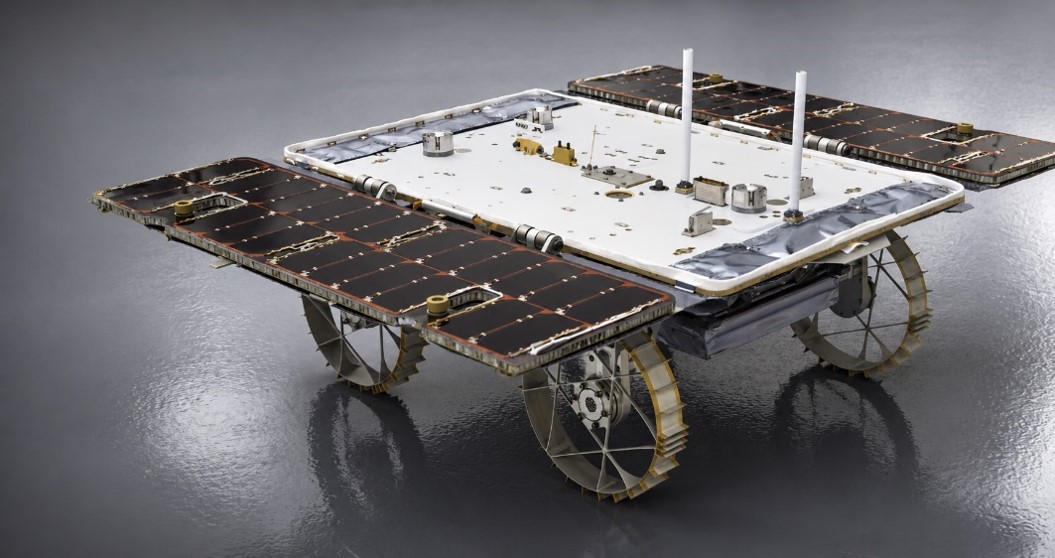
Con software de autonomía basado en tecnología previa de A-PUFFER (con un diseño inspirado en el origami), estos mini-rovers están diseñados para plegarse y quedar casi planos, están equipados con paneles solares, ordenadores a bordo y un conjunto de sistemas e instrumentos que incluyen cámaras estéreo y radares de penetración terrestre o lunar (GPR). Por sí solos, estos robots son máquinas avanzadas capaces de desplazarse y capturar imágenes estéreo de su entorno.
Detalle de uno de los rover de esta misión. Imagen del autor a partir de imágenes de NASA, del Jet Impulsion Laboratory, California Institute of Technology.
Sin embargo, su capacidad aislada tiene un límite operativo crítico. En modelos de operación más centralizados, si un robot encuentra un obstáculo fuera de lo previsto, puede necesitar detenerse, replantear la ruta o esperar nuevas instrucciones. Además, un solo robot no puede registrar simultáneamente mediciones desde múltiples ubicaciones separadas. Es en esta limitación individual donde la necesidad de una «mente colectiva» se vuelve especialmente valiosa.
El cerebro colectivo de la misión: Inteligencia distribuida
Para superar las limitaciones de un explorador solitario, la solución reside en dotar a estas máquinas de una inteligencia cooperativa. Aquí entra en escena el software de autonomía multiagente. En lugar de limitarse a ejecutar comandos individuales, esta tecnología permite que un grupo de robots funcione como un equipo con alta autonomía.
El equipo mecánico de CADRE ATLO. En esta imagen se muestran los siguientes componentes del modelo de vuelo de CADRE. Fila trasera: (de izquierda a derecha) cámara de conocimiento de la situación, desplegador del rover (uno de los tres), estación base. Fila delantera: los tres rovers. Imagen de: Ryan Lannom. NASA. JPL (Jet Propulsion Laboratory).
Cuando cada vehículo capta datos de su entorno, utiliza radios de red en malla para compartir sus hallazgos durante la operación entre sí y con una estación base conectada al módulo de aterrizaje. La estación base cumple un rol de «cerebro superior» (high brain), integrando información colectiva, como los mapas, para devolverla a los exploradores con detalles actualizados.
Esta combinación añade capacidades operativas avanzadas. El sistema coordina autónomamente las actividades, planificando rutas mientras mantiene los niveles de energía y los recursos térmicos de cada robot dentro de los límites. Además, aporta mayor resiliencia mediante un mecanismo de elección de líder que ayuda a mantener la continuidad de la misión si un agente individual falla. Al reducir la necesidad de «llamar a casa» para instrucciones constantes, los exploradores pueden realizar mediciones simultáneas y distribuidas desde ubicaciones separadas que serían físicamente imposibles para un solo vehículo.
Mapeando el subsuelo lunar con CADRE
Para demostrar la viabilidad de esta sinergia, la NASA ha diseñado una demostración en la región lunar de Reiner Gamma, adonde llegarán a bordo del módulo de aterrizaje de la misión IM-3. Uno de los objetivos de CADRE es mapear el subsuelo de esta zona con alto grado de autonomía durante las horas iluminadas de un día lunar, lo que equivale a unos 14 días terrestres.

Simulación del despliegue de los robots en la superficie lunar. Imagen del autor a partir de imágenes de NASA, del Jet Propulsion Laboratory, California Institute of Technology.
La misión despliega tres pequeños rovers y una estación base central. Operando en una formación de línea con una separación de un metro, los vehículos recorrerán un área de 20 por 20 metros, tomando mediciones multiestáticas cada 0,2 metros con sus radares de penetración terrestre o lunar. El software de autonomía y procesamiento utilizará estos datos para construir un mapa tridimensional del subsuelo sin requerir comandos directos constantes desde la Tierra.
Antes de su viaje, el sistema se ha sometido a exhaustivos procesos de validación. En el Jet Propulsion Laboratory (JPL), los modelos de vuelo han superado pruebas en cámaras de vacío térmico para simular las temperaturas extremas de la Luna. Paralelamente, los equipos han empleado simuladores avanzados y bancos de prueba para evaluar la fiabilidad de los algoritmos de percepción, navegación y toma de decisiones.
Implicaciones Amplias y Contexto General
Si proyectos como CADRE tienen éxito, serán solo el prólogo. La combinación de robótica miniaturizada y software de autonomía distribuida tiene aplicaciones que podrían trascender esta demostración lunar prevista. En el futuro, esta tecnología podría expandirse para explorar terrenos extremos y de difícil acceso en otros destinos, como los tubos de lava en la Luna o Marte, y, en conceptos análogos, mundos oceánicos como Europa, la luna de Júpiter. La capacidad de compartir conocimientos y datos de sensores entre múltiples agentes podría permitir, por ejemplo, crear redes sísmicas distribuidas o telescopios de apertura sintética.
En nuestro contexto europeo y español, esta tecnología resulta profundamente relevante. Universidades, centros de astrobiología y agencias como la Agencia Espacial Europea (ESA) observan, coordinan o desarrollan conceptos de autonomía robótica. La meta futura de los investigadores de CADRE es que estos sistemas de autonomía se conviertan en soluciones comerciales disponibles que puedan integrarse fácilmente en diferentes instrumentos científicos o robots fabricados fuera de la NASA.
El gran desafío a futuro consistirá en escalar estos sistemas y aumentar su robustez en misiones de larga duración, abriendo la puerta a ecosistemas espaciales donde vehículos y estaciones colaboren como un solo organismo.
El amanecer de la inteligencia colectiva espacial
El proyecto CADRE busca demostrar de forma elocuente que el futuro de una parte de la exploración espacial no pertenece solo al robot solitario, sino también al trabajo en equipo. La sinergia entre la robótica móvil miniaturizada y el software de autonomía multiagente busca reducir el histórico problema de los retrasos y ciclos de comunicación en misiones espaciales.
Al dotar a estos pequeños vehículos de una «mente colectiva», estamos pasando de teleoperar herramientas a distancia a desplegar equipos robóticos con alta autonomía.
Los beneficios potenciales de esta alianza tecnológica son significativos. Puede ampliar nuestra capacidad para realizar mediciones científicas en lugares inaccesibles y aumentar el retorno científico de las misiones al reducir el tiempo que los rovers pasan inactivos esperando instrucciones. Además, su diseño distribuido aumenta la resiliencia de la misión ante posibles fallos individuales, ofreciendo un modelo más robusto.
Nos encontramos ante un posible cambio de paradigma fascinante. Es relevante que la industria, las agencias espaciales y el ámbito académico sigan invirtiendo en el desarrollo de la autonomía robótica colaborativa. Apoyar e impulsar esta «inteligencia colectiva» puede ser una vía clave para explorar rincones lejanos y extremos del cosmos de una manera más rápida, profunda y eficiente.